Sản phẩm
Tìm kiếm

Dịch vụ Trực tuyến
| Phụ tùng thay thế(24 H)-Fiona | |
| Thiết bị-Lee | |
| Vật tư tiêu hao duy trì-Jessica |












| Phụ tùng thay thế(24 H)-Fiona | |
| Thiết bị-Lee | |
| Vật tư tiêu hao duy trì-Jessica |
Trước khi phân tích lỗi, Chúng ta cần hiểu ứng dụng và nguyên lý của truyền động động cơ bước.
1. Nguyên lý của máy SMT về trình điều khiển động cơ bước
Trình điều khiển động cơ bước chuyển đổi tín hiệu kỹ thuật số từ hệ thống điều khiển của máy gắn trên bề mặt thành các xung điện điều khiển động cơ bước. Những xung này quyết định hướng đi, tốc độ, và vị trí của trục động cơ.

2. Phụ kiện và linh kiện của trình điều khiển động cơ bước của máy móc trong sản xuất
Điều khiển: Nhận lệnh từ hệ thống điều khiển chính của máy gắp đặt hoặc máy hàn sóng và tạo ra các chuỗi xung thích hợp.
Mạch trình điều khiển: Amphóa lỏng các xung từ bộ điều khiển đến mức phù hợp với động cơ.
Cung cấp năng lượng: Cung cấp cho việc gia công tự động công suất điện cần thiết cho động cơ và mạch truyền động.
Hệ thống phản hồi: Theo dõi vị trí và chuyển động của động cơ để đảm bảo độ chính xác của máy dây chuyền SMT hoặc hàn.
3. Chức năng nào hoạt động trong Máy chọn và đặt SMT và máy in 3D PCB
Tạo xung: Hệ thống điều khiển của máy chọn và đặt gửi một loạt các xung kỹ thuật số đến trình điều khiển động cơ bước. Mỗi xung đại diện cho một bước mà động cơ nên thực hiện.
Khuếch đại và phân phối xung: Trình điều khiển khuếch đại các xung này và phân phối chúng đến các cuộn dây thích hợp trong động cơ bước, làm cho động cơ di chuyển theo từng bước chính xác.
Kiểm soát hướng: Hướng của các xung xác định hướng quay của động cơ bước. Chẳng hạn, một chuỗi xung theo chiều kim đồng hồ sẽ làm cho động cơ quay theo chiều kim đồng hồ.
Bước vi mô: Trình điều khiển động cơ bước hiện đại hỗ trợ microstep, cho phép động cơ di chuyển theo các bước nhỏ hơn so với kích thước bước tiêu chuẩn của nó, Cung cấp chuyển động mượt mà và chính xác hơn. Điều quan trọng trong sản xuất điện tử máy SMT là đặt chính xác các thành phần nhỏ trên PCB(Bảng mạch in).
Kiểm soát tốc độ: Tần số của xung kiểm soát tốc độ của động cơ. Tốc độ xung nhanh hơn dẫn đến tốc độ động cơ cao hơn, trong khi tốc độ xung chậm hơn làm giảm tốc độ.

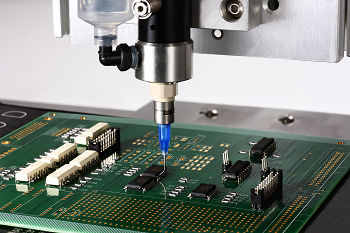
4. Ứng dụng trong máy chọn và đặt SMT.
Chuyển động trục XY: Các trình điều khiển động cơ bước điều khiển chuyển động trục X và trục Y của đầu vị trí, cho phép nó di chuyển đến vị trí tọa độ chính xác trên PCB, nơi các thành phần bảng mạch PCB cần được đặt.
Chuyển động trục Z: Máy SMT cũng sử dụng động cơ bước để điều khiển chuyển động trục Z (Chuyển động lên và xuống) của đầu vị trí, Đảm bảo thành phần được đặt với áp suất và căn chỉnh chính xác.
Xoay: Động cơ bước và trình điều khiển của chúng cũng có thể điều khiển chuyển động quay của đầu vị trí hoặc vòi phun SMT để định hướng chính xác các thành phần SMD trước khi đặt.
5. Phản hồi và hiệu chuẩn
Hệ thống vòng kín: Trình điều khiển động cơ bước tiên tiến trong máy SMT hoạt động trong hệ thống vòng kín, Sử dụng bộ mã hóa’ phản hồi để sửa sai lệch so với vị trí mong muốn, Đảm bảo độ chính xác và độ tin cậy cao trong dịch vụ sản xuất điện tử.